Point#
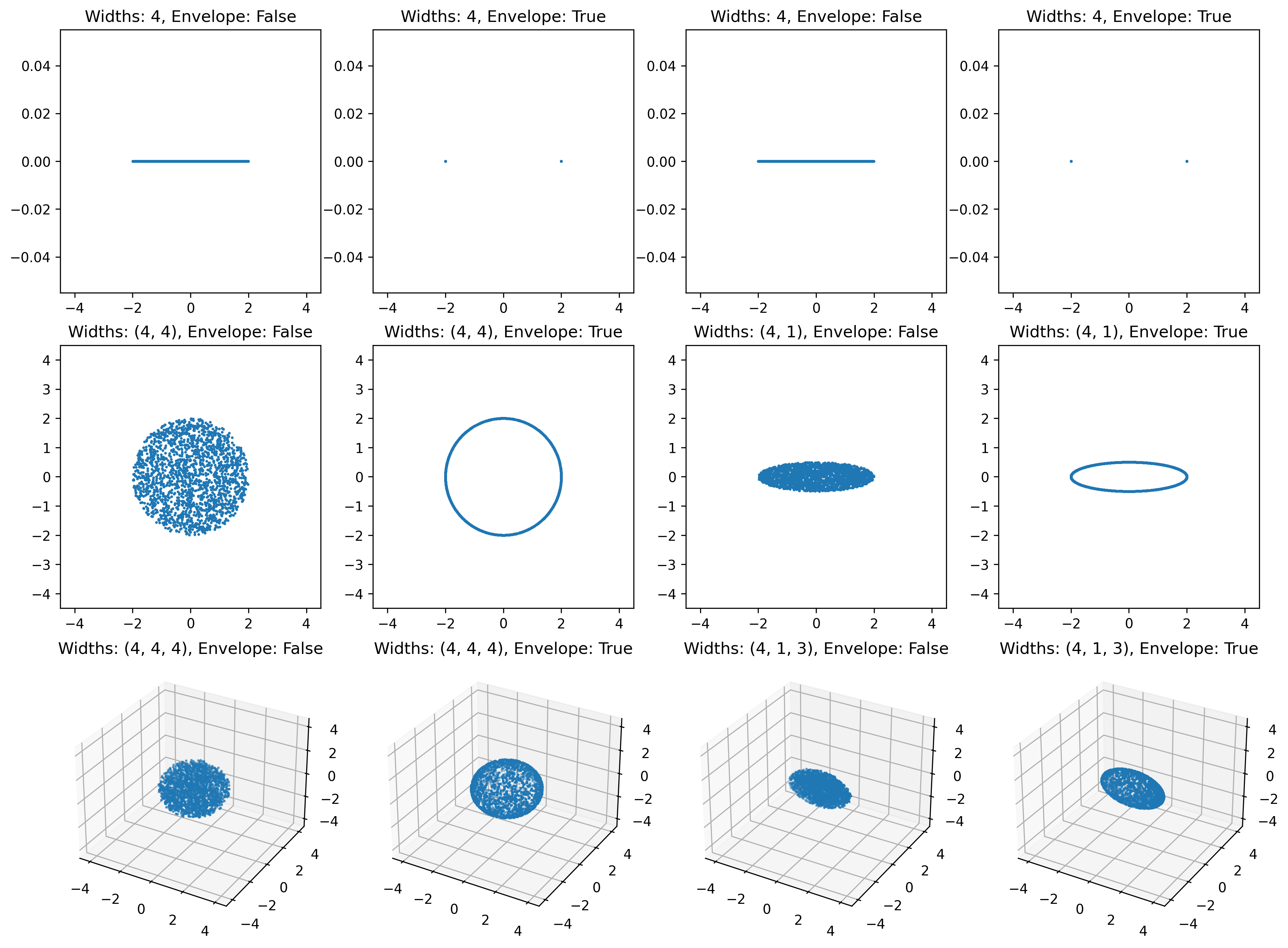
- ball_uniform(num_points: int, num_dimensions: int, center_point: Iterable[float] = None, widths: float | Iterable[float] = 1, only_envelope: bool = False, seed: int = None) ndarray[source]#
Samples points uniformly at random in a ball. This function can also handle spheres and spheres of different width per dimensions, leading to distributions that are not really balls. For instance, you can obtain an ellipse by providing two different widths in the 2D case.
- Parameters:
num_points (int) – The number of points to sample.
num_dimensions (int) – The number of dimensions for the ball.
center_point (Iterable[float]) – The coordinates of the center point of the ball. It needs to have one coordinate per dimension.
widths (float | Iterable[float], default:
1) – The width of the ball. If a single value is given, the width is applied to all dimensions. In case multiple values are given, they are applied to each dimension independently.only_envelope (bool, default:
False) – If set toTrueonly points on the envelope of the ball (the corresponding sphere) are sampled, and not in the inside.seed (int, default:
None) – Seed for numpy random number generator.
- Returns:
The coordinates of the
num_pointspoints that have been sampled.- Return type:
np.ndarray
Validation
- sphere_uniform(num_points: int, num_dimensions: int, center_point: Iterable[float] = None, widths: float | Iterable[float] = 1, seed: int = None) ndarray[source]#
Samples points uniformly at random in a sphere, that is, in the envelope of a ball.
This is simply a shortcut of the
ball_uniform()withonly_envelope = True.- Parameters:
num_points (int) – The number of points to sample.
num_dimensions (int) – The number of dimensions for the ball.
center_point (Iterable[float]) – The coordinates of the center point of the ball. It needs to have one coordinate per dimension.
widths (float | Iterable[float], default:
1) – The width of the ball. If a single value is given, the width is applied to all dimensions. In case multiple values are given, they are applied to each dimension independently.seed (int, default:
None) – Seed for numpy random number generator.
- Returns:
The coordinates of the
num_pointspoints that have been sampled.- Return type:
np.ndarray
Validation

- ball_resampling(num_points: int, num_dimensions: int, inner_sampler: Callable, inner_sampler_args: dict, center_point: Iterable[float] = None, width: float = 1, max_numer_resampling: int = 1000, seed: int = None) ndarray[source]#
Uses another point sampler and reject all points that do not fall inside the ball described as parameter.
Be careful, if not set properly, this can run until the end of time (if always resampling for instance).
- Parameters:
num_points (int) – The number of points to sample.
num_dimensions (int) – The number of dimensions for the ball.
inner_sampler (Callable) – The function used to sample points before resampling. This function should accept an optional
seedparameter. Other parameters should be passed by name via theinner_sampler_argsargument.inner_sampler_args (dict) – The arguments passed to the inner_sampler.
center_point (Iterable[float]) – The coordinates of the center point of the ball. It needs to have one coordinate per dimension.
width (float, default:
1) – The width of the ball. Can only be a single value (as opposed toball_uniform()).max_numer_resampling (int, default:
1000) – The maximum number of resampling. If exceeded, the center point is used.seed (int, default:
None) – Seed for numpy random number generator. We increase the seed by one each time we resample (to avoid always resampling the same point).
- Returns:
The coordinates of the
num_pointspoints that have been sampled.- Return type:
np.ndarray
Validation

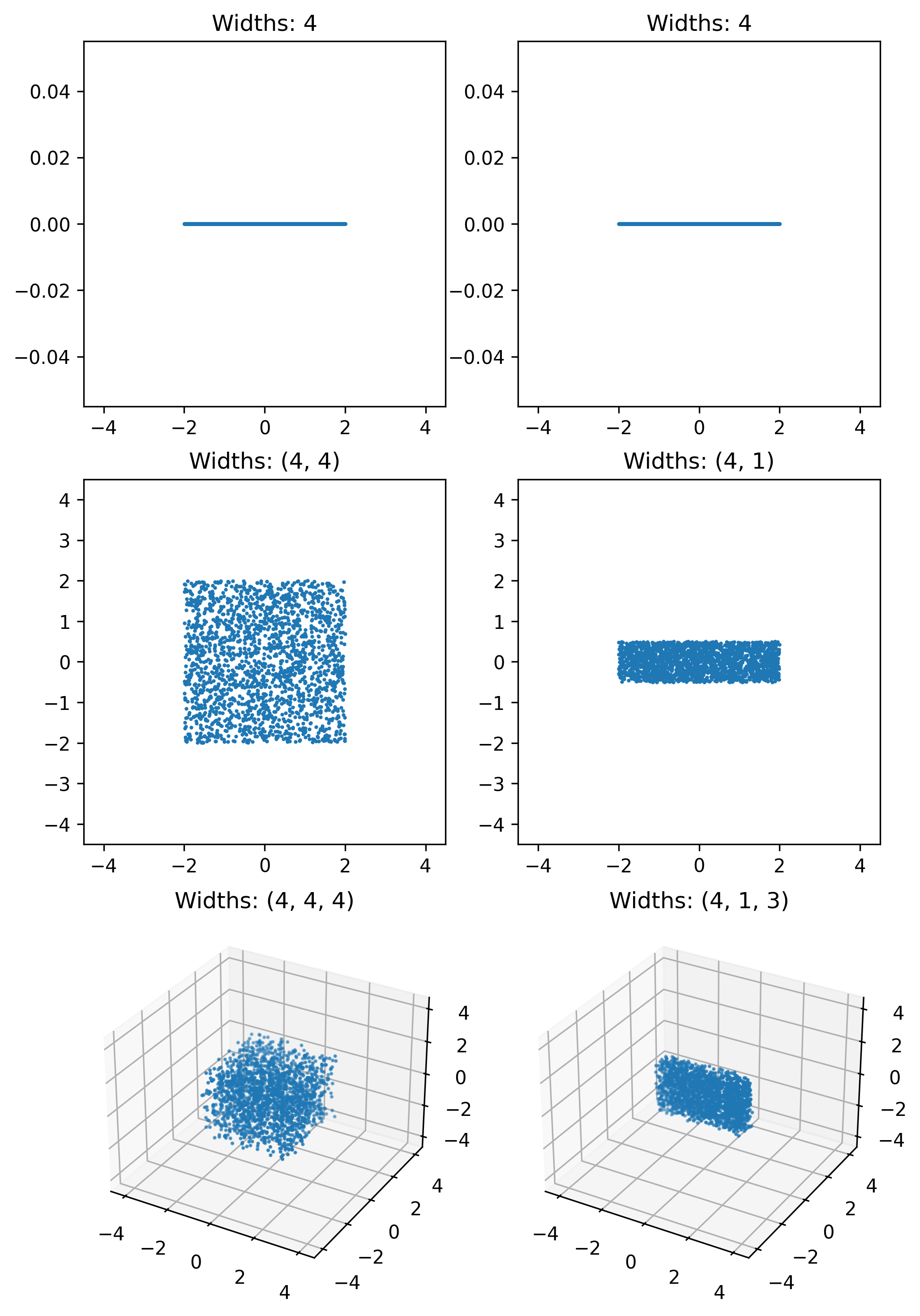
- cube(num_points: int, num_dimensions: int, center_point: Iterable[float] = None, widths: float | Iterable[float] = 1, seed: int = None) ndarray[source]#
Samples points uniformly at random in a cube.
- Parameters:
num_points (int) – The number of points to sample.
num_dimensions (int) – The number of dimensions for the cube.
center_point (Iterable[float]) – The coordinates of the center point of the cube. It needs to have one coordinate per dimension.
widths (float | Iterable[float], default:
1) – The width of the space distribution. If a single value is given, the width is applied to all dimensions. In case multiple values are given, they are applied to each dimension independently.seed (int, default:
None) – Seed for numpy random number generator.
- Returns:
The coordinates of the
num_pointspoints that have been sampled.- Return type:
np.ndarray
Validation
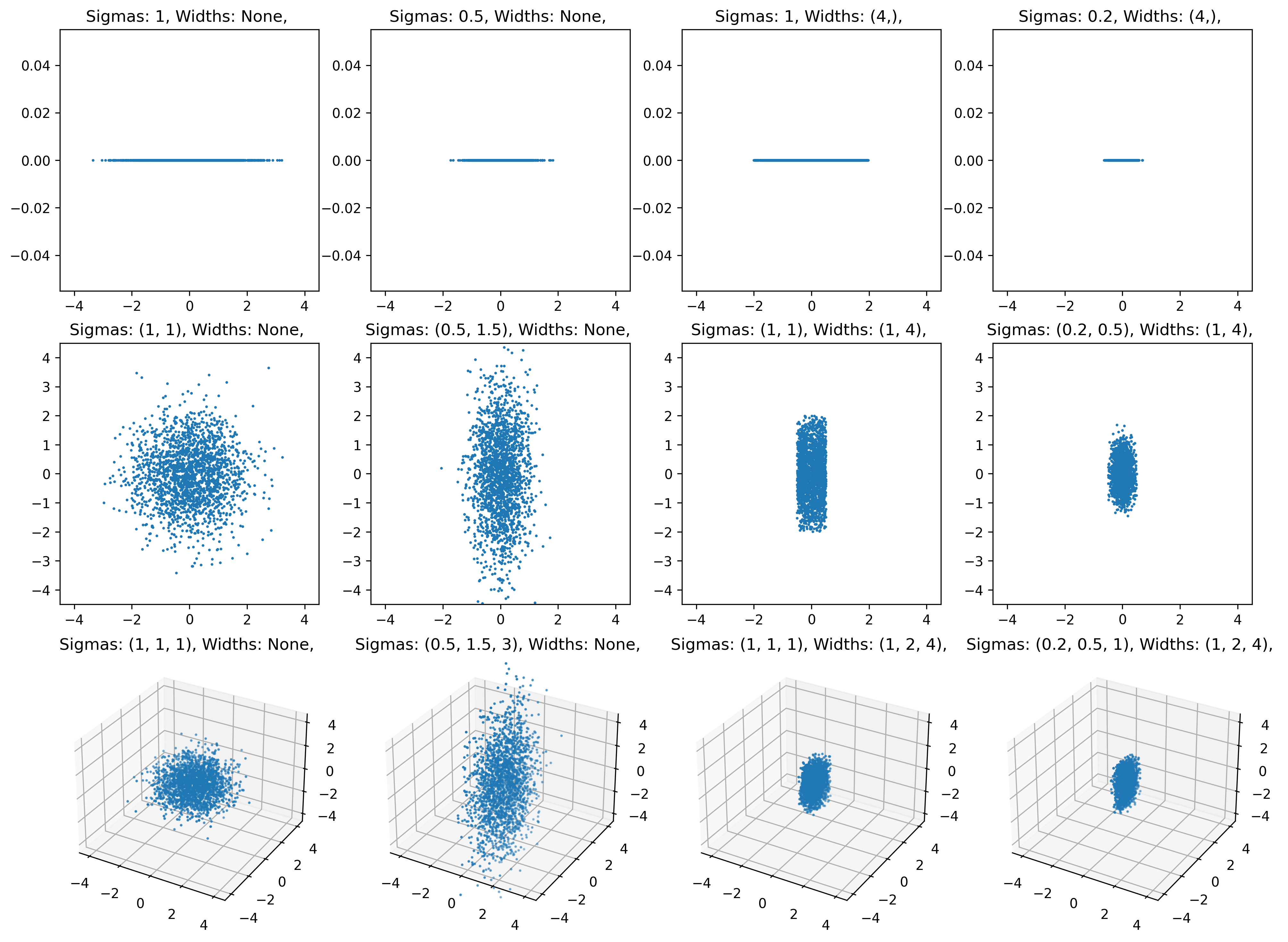
- gaussian(num_points: int, num_dimensions: int, center_point: Iterable[float] = None, sigmas: float | Iterable[float] = 1, widths: Iterable[float] = None, seed: int = None) ndarray[source]#
Samples points uniformly at random in a gaussian space.
- Parameters:
num_points (int) – The number of points to sample.
num_dimensions (int) – The number of dimensions for the Gaussian space.
center_point (Iterable[float]) – The coordinates of the center point of the gaussian distribution. It needs to have one coordinate per dimension.
sigmas (float | Iterable[float], default:
1) – The standard deviation of the gaussian distribution. If a single value is given, the width is applied to all dimensions. In case multiple values are given, they are applied to each dimension independently.widths (Iterable[float], default:
None) – Maximal widths for the Gaussian distributions. One width per dimension needs to be provided. When sampling points, if the distance between the point and the center point is larger than half the width of a dimension, the point is resampled.seed (int, default:
None) – Seed for numpy random number generator.
- Returns:
The coordinates of the
num_pointspoints that have been sampled.- Return type:
np.ndarray
Validation